SAGES Framework and Architecture
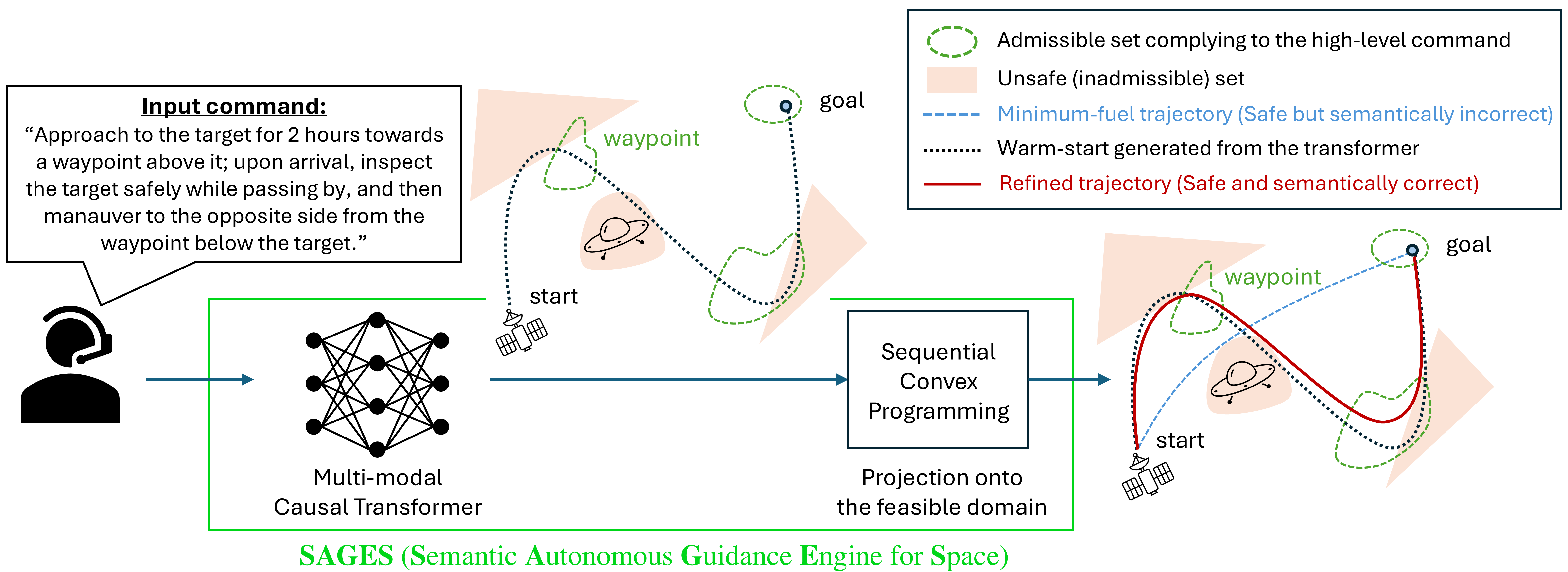
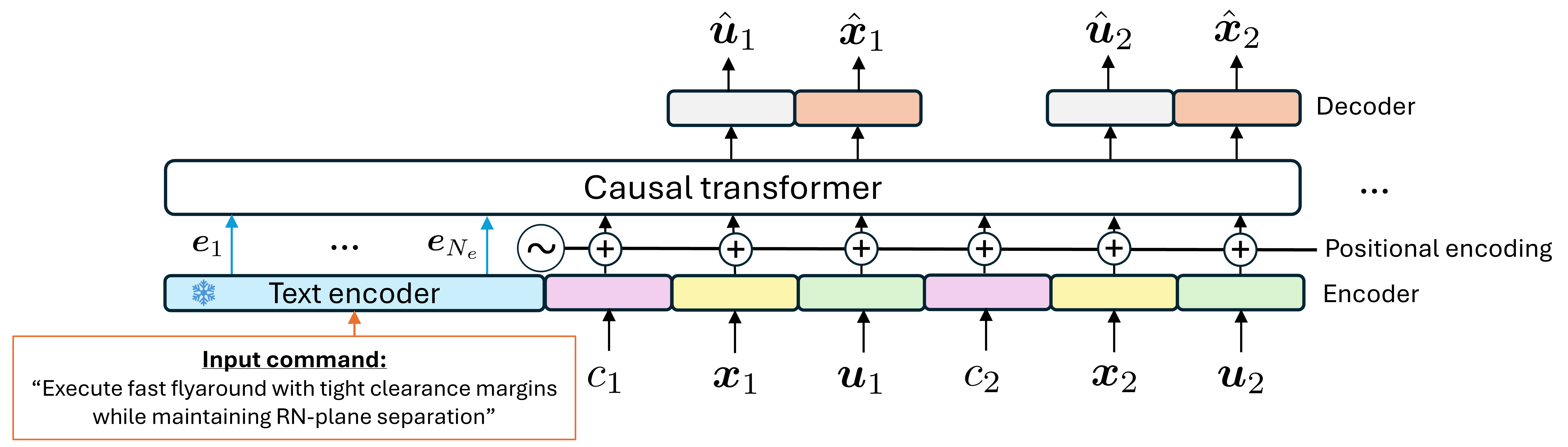
The following figure illustrates the neural network architecture used for semantic trajectory generation in SAGES. Natural-language task descriptions, constraint signals, system states, and control histories are embedded into a shared latent space, which is leveraged to autoregressively predict dynamically feasible trajectories.